Introduction to Robotics with ROSMO Robots
This class is designed for instructors to learn the basics of robotics and programming using ROSMO Robots. You will be using MicroBlocks, a simple and powerful visual programming language, as an introduction to coding. For those who wish to advance, you can transition from MicroBlocks to Python as you become more comfortable programming the robots.
The course consists of several hands-on modules, beginning with an Introduction to Robotics. These modules cover topics like:
- Driving the robot
- Using sensors
- Operating the manipulator (robot arm)
Final Project: Delivery Robot Challenge
The course concludes with an exciting final project that brings together everything you have learned in the previous modules. This Delivery Robot Challenge allows students to program their robot to complete a series of tasks. To add a competitive element, an optional scoring rubric is provided to evaluate the runs completed by students.

Support and Contact
We hope this course is engaging and enjoyable for both you and your students. Since this is a new course with new robots and software, there may be occasional bugs or unexpected issues. If you encounter any challenges or have questions, don’t hesitate to contact us.
For more details about the program and resources, please visit the ROSMO website.
Dive in and start exploring the world of robotics with ROSMO and MicroBlocks!
In this Module You Will:
- Learn about the field of robotics
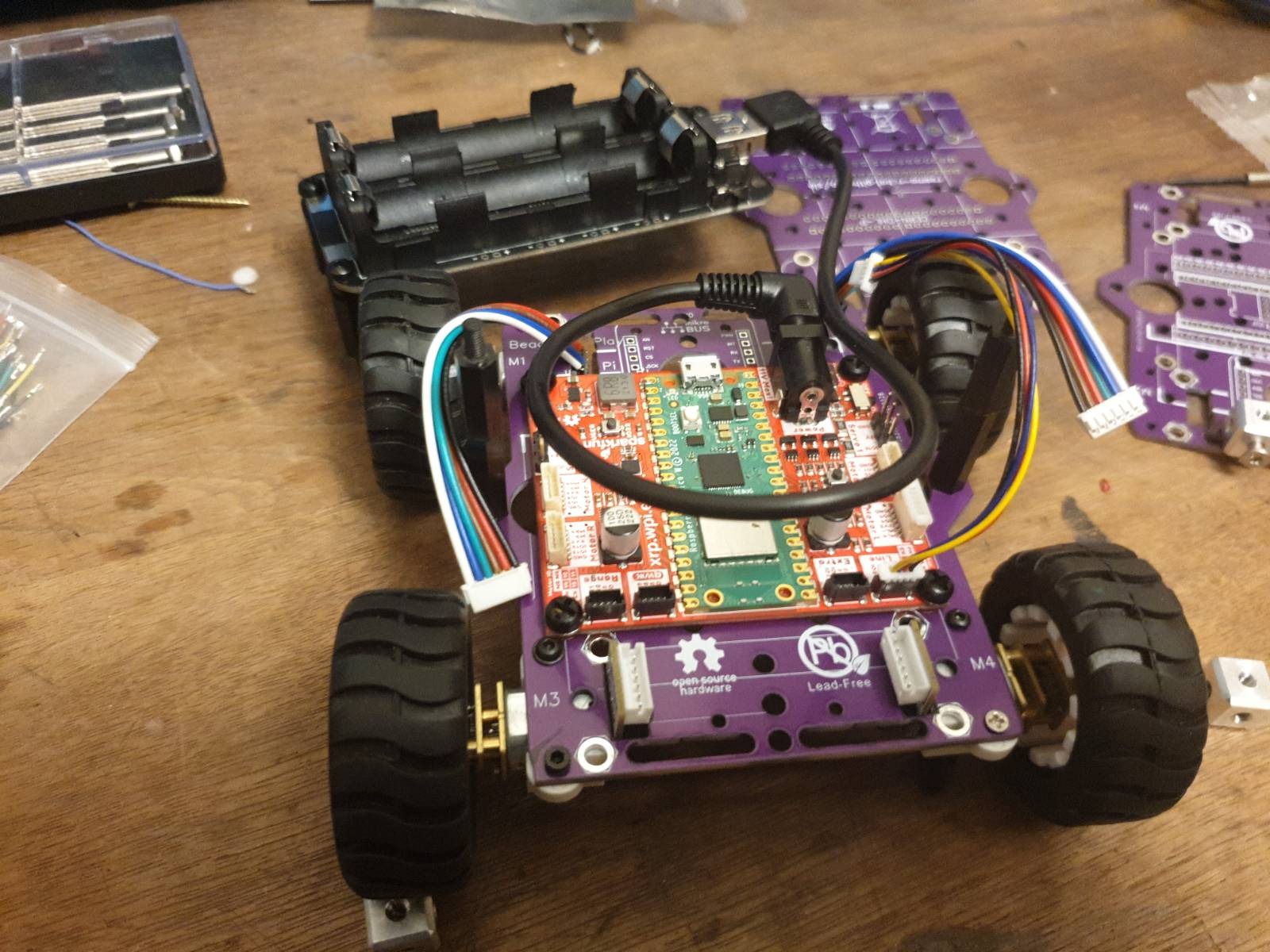
- Assemble your robot
- Install the software required for programming the robot
- Write a short program to familiarize yourself with programming the ROSMO robot
At the End of this Module, You Will Be Able To:
- Recognize the characteristics of robots
- Discuss the core disciplines that make up the field of robotics
- Understand the components of the robot and how it is assembled
- Be familiar with the tools for programming
Completing the Module
To finish this module, review and complete all tasks outlined in each section. Then, successfully pass the module quiz at the end.
Getting the Robot to Drive
In This Module, Students Will:
- Learn how to set power to the robot’s drivetrain
- Understand the relationship between motor efforts and the robot’s motion
- Be introduced to motor encoders and how to use them to correct the robot’s motion
- Use the pre-made drive, turn, and button functions
At the End of This Module, Students Will Be Able To:
- Control the robot’s basic motions
- Understand the basics of while loops and exit conditions
- Be familiar with making and running functions
- Break down a larger path into components and convert it into code
Objectives
- Get at strong foundation in open-source electronics and prototyping
- Gain intuition on mechanical prototyping and design with dc brush motors, servo motors
- Apply basic machine learning and computer vision to a small project

Other PicoW or ESP32 cars
-
Edurob not yet available for sale
-
Wukong 2040 no encoders, closed hardware
-
ESP cam car, no encoders, closed hardware
Notes on software installed on the Ubuntu 22.04 Virtualbox image, or compute module
apt-get update
sudo apt remove unattended-upgrades
ssh -p 3022 ros2@127.0.0.1
wget https://raw.githubusercontent.com/linorobot/ros2me/master/install
nano install
chmod 777 install
./install
source /opt/ros/humble/setup.bash
cd /tmp
wget https://github.com/hippo5329/linorobot2/raw/humble/install_linorobot2.bash
bash install_linorobot2.bash 2wd ld19
source ~/.bashrc
https://github.com/hippo5329/linorobot2_hardware/wiki#installation
git clone -b esp32_zio https://github.com/hippo5329/linorobot2_hardware.git
| dmesg | grep tty |