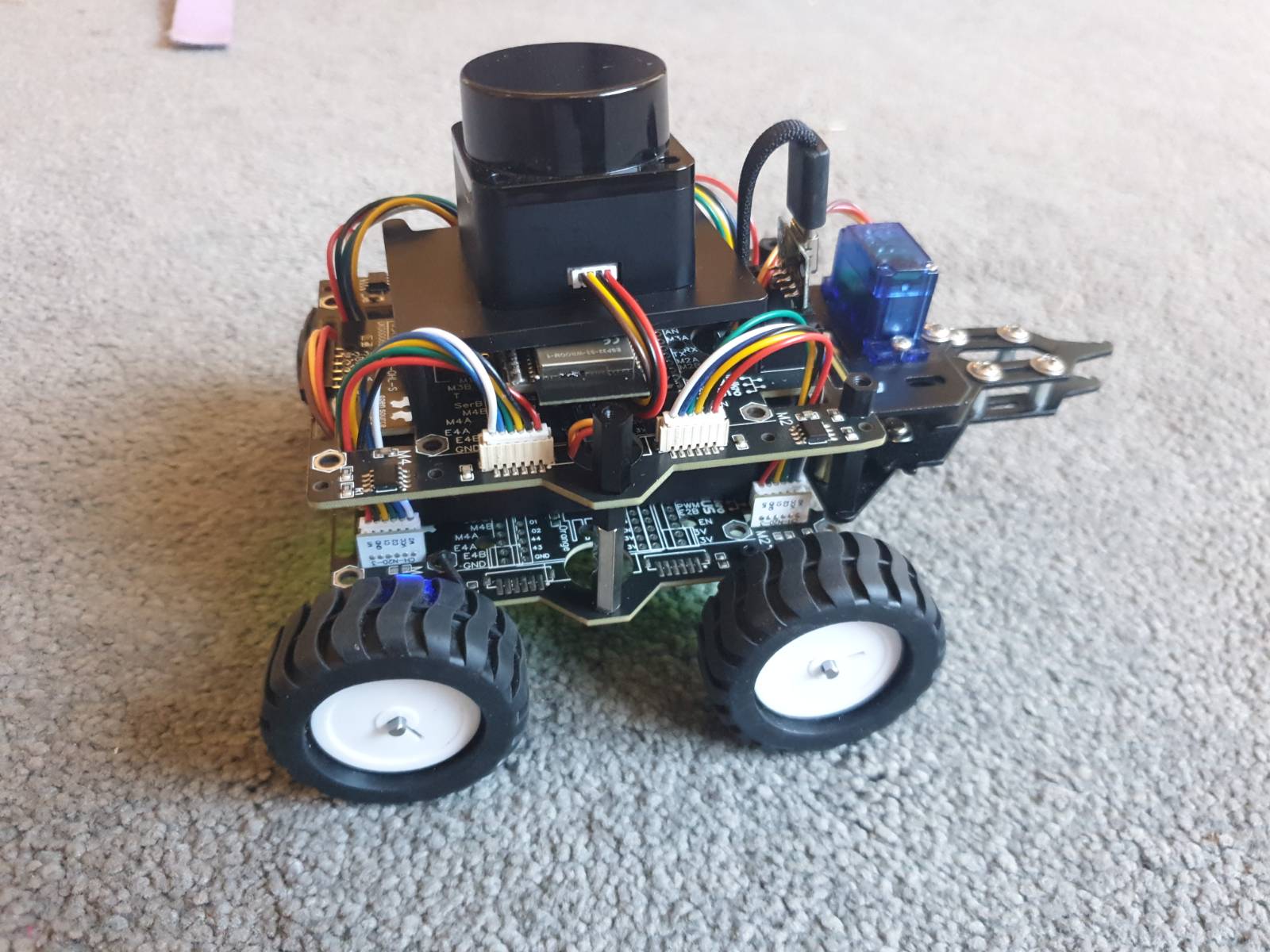
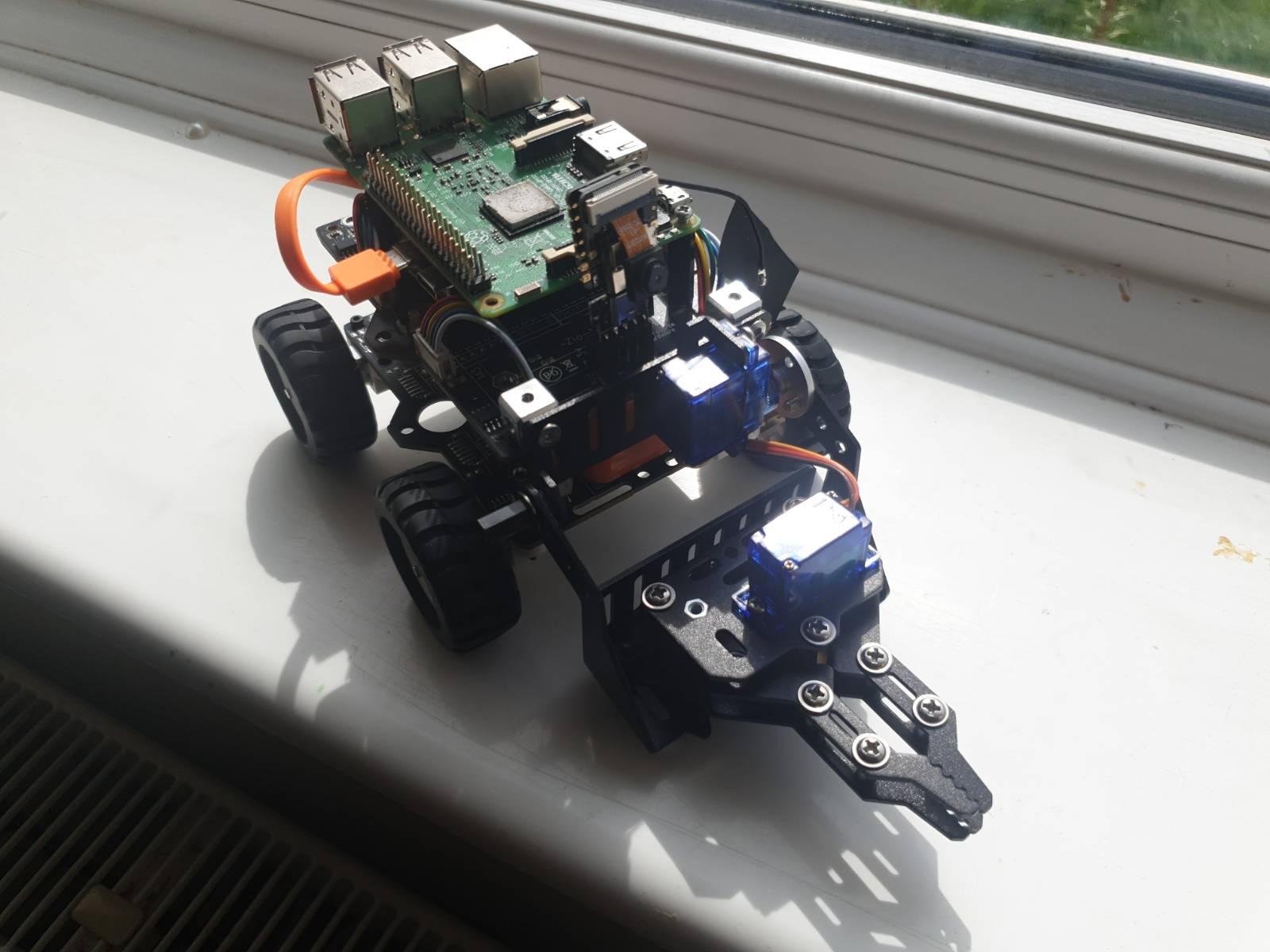
A micro-robot for ROS2 & Microblocks that can be assembled without soldering, or access to a 3D printer. An affordable, adaptable, and open-source robot, for students, makers, universities, R&D.
If you’d like one please sign up for Tindie waitlist
Status: Works, you can fabricate one and drive it around but I2C is flaky
Parts list
| Part | Description | Quantity |
|---|---|---|
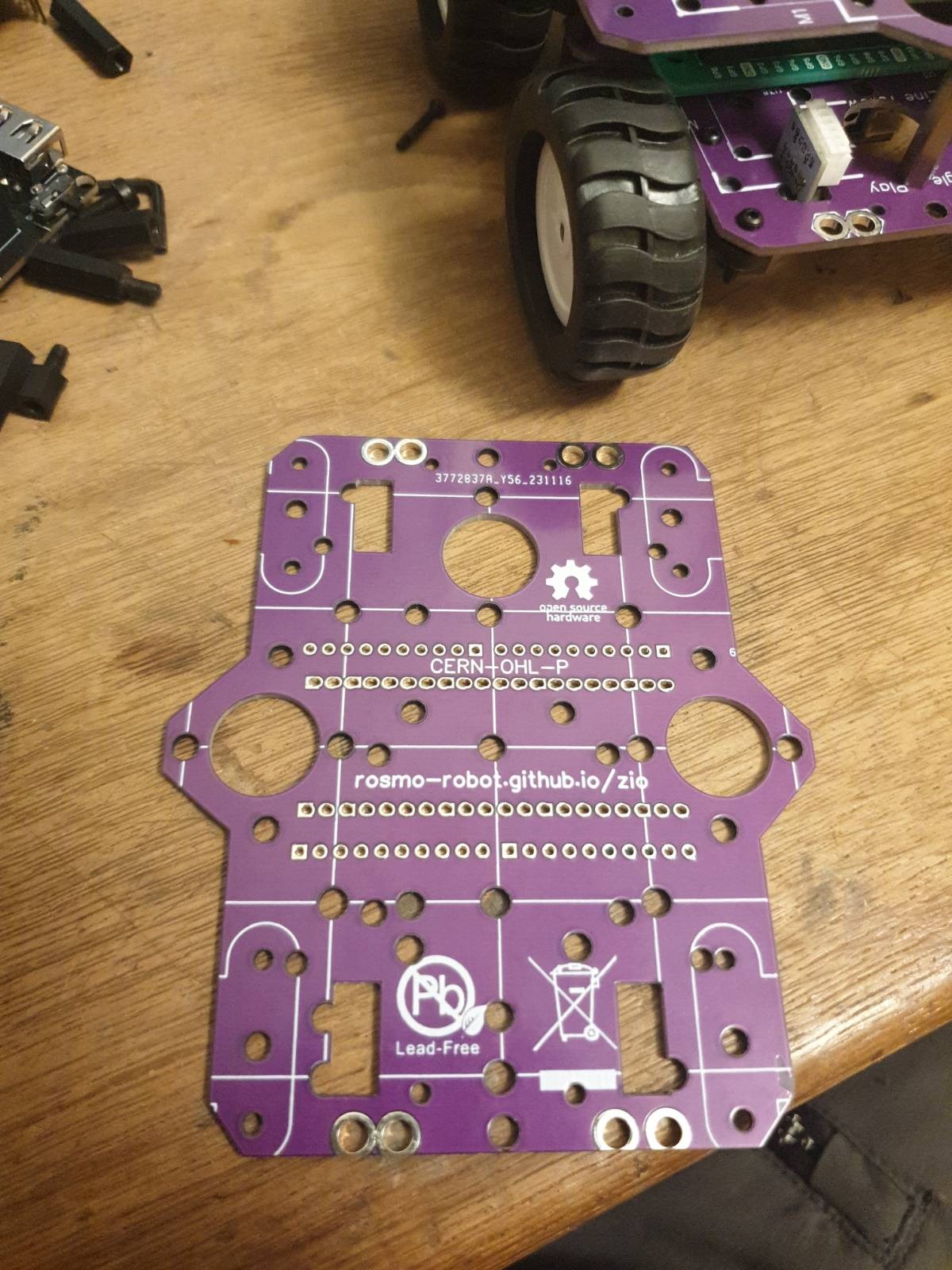
| ~$12 Rosmo Chassis | Custom PCB Chassis for sale soon | 1 |
| ~$16-$32 Motors with encoder & wheel | 6v 150RPM $Bringsmart motors also sold by Adafruit/mouser | 2 or 4 |
| ~$5 80mm motor cables | 6Pin reverse direction cables | 4 |
| ~$6 - $12 ESP32-S3-C1 N16R8 | Olimex open hardware -recomended, UK US, AUS official or Closed Waveshare ESP32s3 very cheap alternatives may require soldering | 1 |
| ~$5 Hex Spacers | 15mm height M3 standoff or 200pc M3 pack | 1 |
| ~$9 1x 2A powerbank | OSHW powerbank or TNTOR Powerbank or Aliexpress Powerbank* | 1 |
| ~$4 USB>Pin adaptor | Type 3 DIP-4P* | 1 |
*buy batteries locally if your postage service has restrictions on Lithium.

~$50 US for 2wd, ~$80 for 4wd
Rosmo is built from modular components on the Open Robotic Platform rules
Some of the links on this page are affiliate links to help offset the costs of this project, no one is getting rich off of these. List of the above items on Aliexpress cost can be reduced, by using existing powerbank.

Optional extras
| Add on | ROS2 Linorobot | Microblocks | Micropython |
|---|---|---|---|
| MPU6050 IMU | Yes | Yes | To do |
| vl53l5cx | To do | Yes | To do |
| BNO055 IMU | Yes | To do | To do |
| Ultrasonic - ZIO | Yes | Yes | Yes |
| LD19/D300 LiDAR module, | Yes | Never | Never |
| TOF Adafruit or Sparkfun | Yes | Yes | To do |
| OLED/Eyes - Zio | To do | To do | To do |
| Line finder - ZIO | To do | To do | To do |
| Servo - Zio for mini arm | To do | To do | To do |
| LED - Zio | To do | To do | To do |
| Mecanum wheels (48mm) & Adaptor | Yes | To do | To do |
| 10mm Cube standoff | Yes | Yes | Yes |
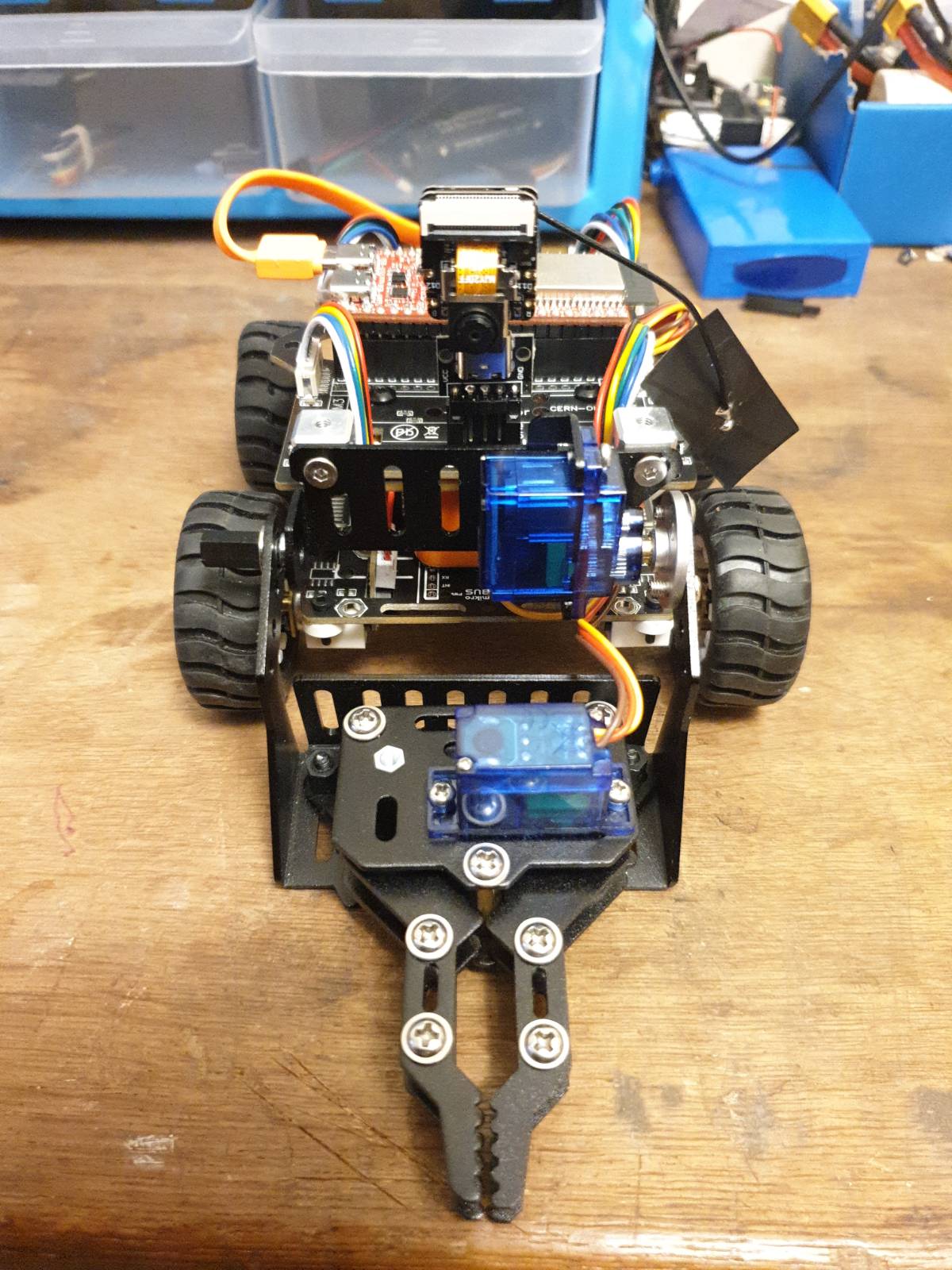
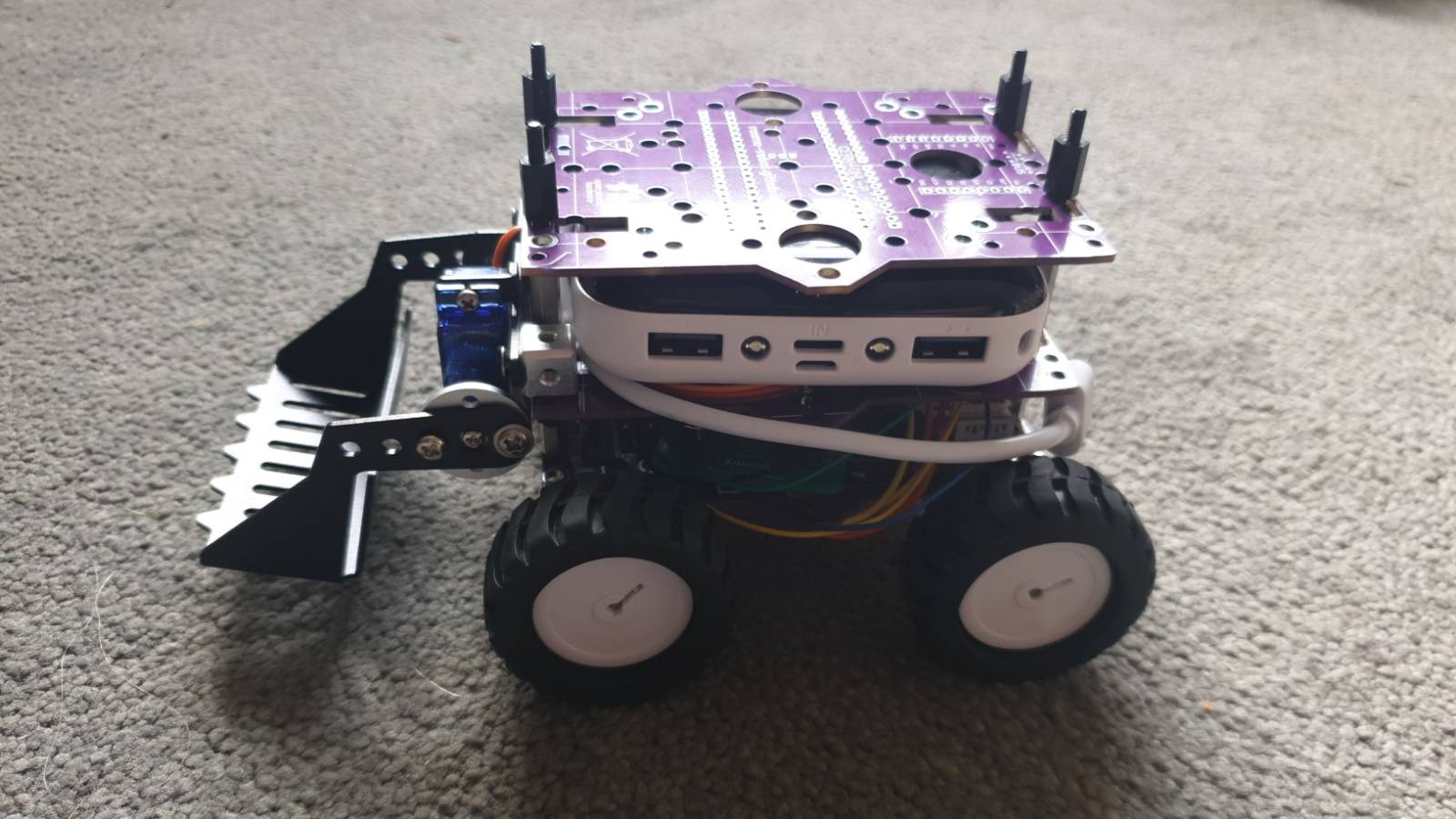
| Loader attachment (closed hardware) Grabber attachment | To do | Yes | To do |
| 1300 MikroBUS, other sensors (closed hardware) | partial | partial | partial |
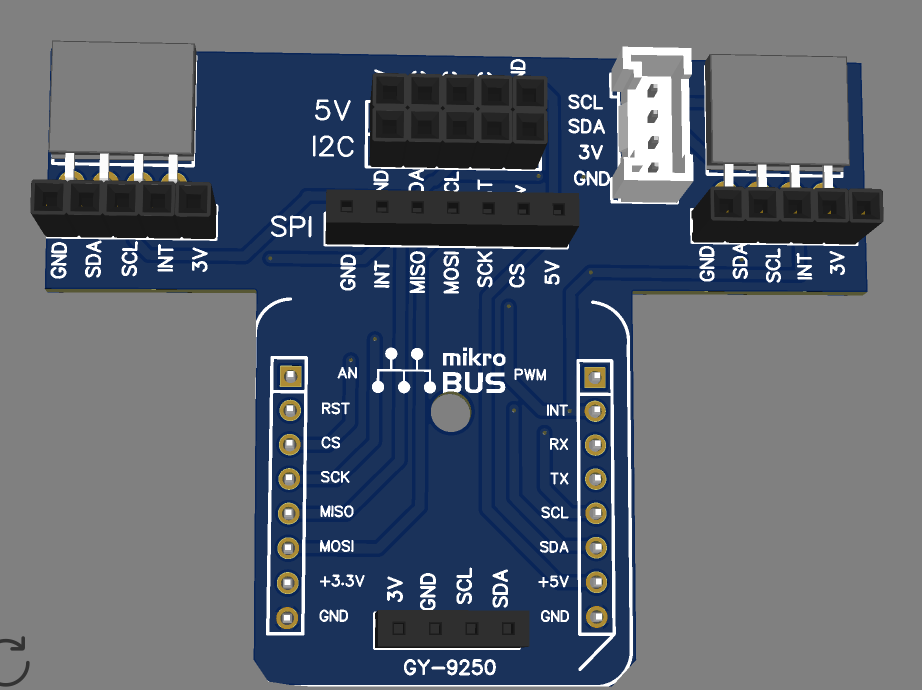
Daughter boards
 Mikrobus header can break out into a add on board concept here) students or others may want to design their own breakouts.
Mikrobus header can break out into a add on board concept here) students or others may want to design their own breakouts.
| Add on for breakouts | ROS2 Linorobot | Microblocks | Micropython |
|---|---|---|---|
| ESP32-S3 camera (closed hardware) | Likely | Untested | Untested |
| USBC power adaptor (closed hardware) | Untested | Untested | Untested |
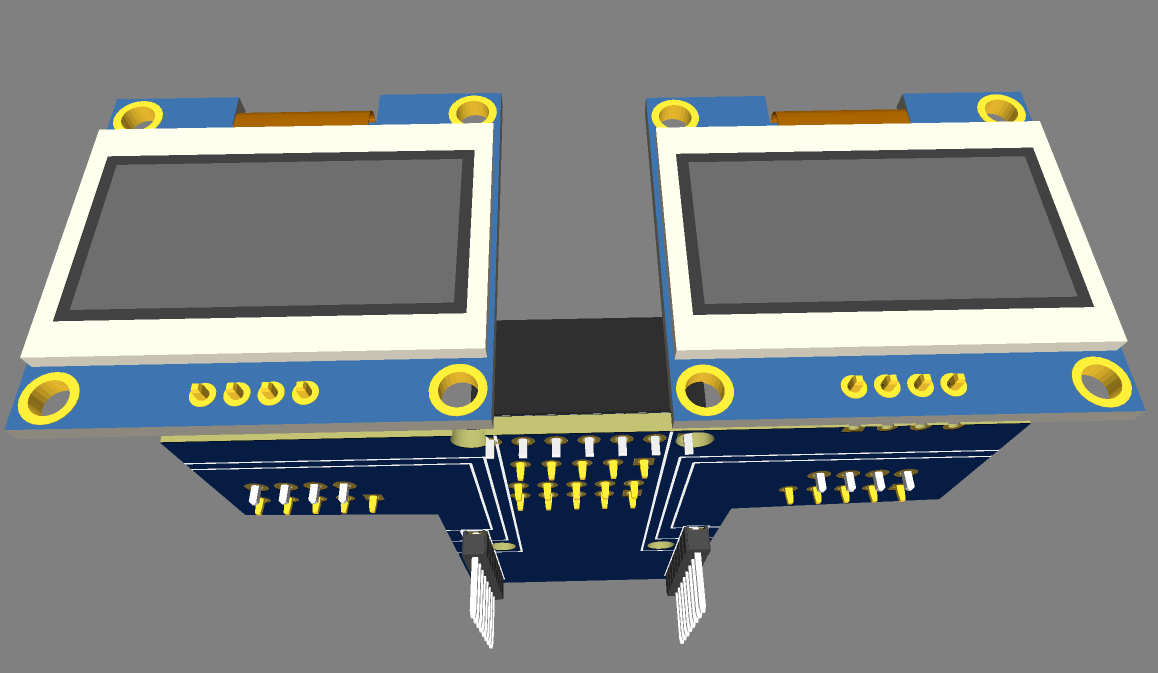
| 1.3” OLED | Untested | Untested | Untested |
| Pimoroni SPI or I2C sensors | Untested | Untested | Untested |
I also did a breakout in a Wemos D1 format as there are a good number of cheap sensors available in this footprint
Schematic
Can be found here

Collaborators
I’d love to work with people on the software, give us a shout on Twitter or Hackaday.io if you’re interested some ideas here
License
PCB is CERN-OHL-S This documentation is CC-BY-4.0 unless otherwise noted on the page.
Older photos of iteration process

- 2WD
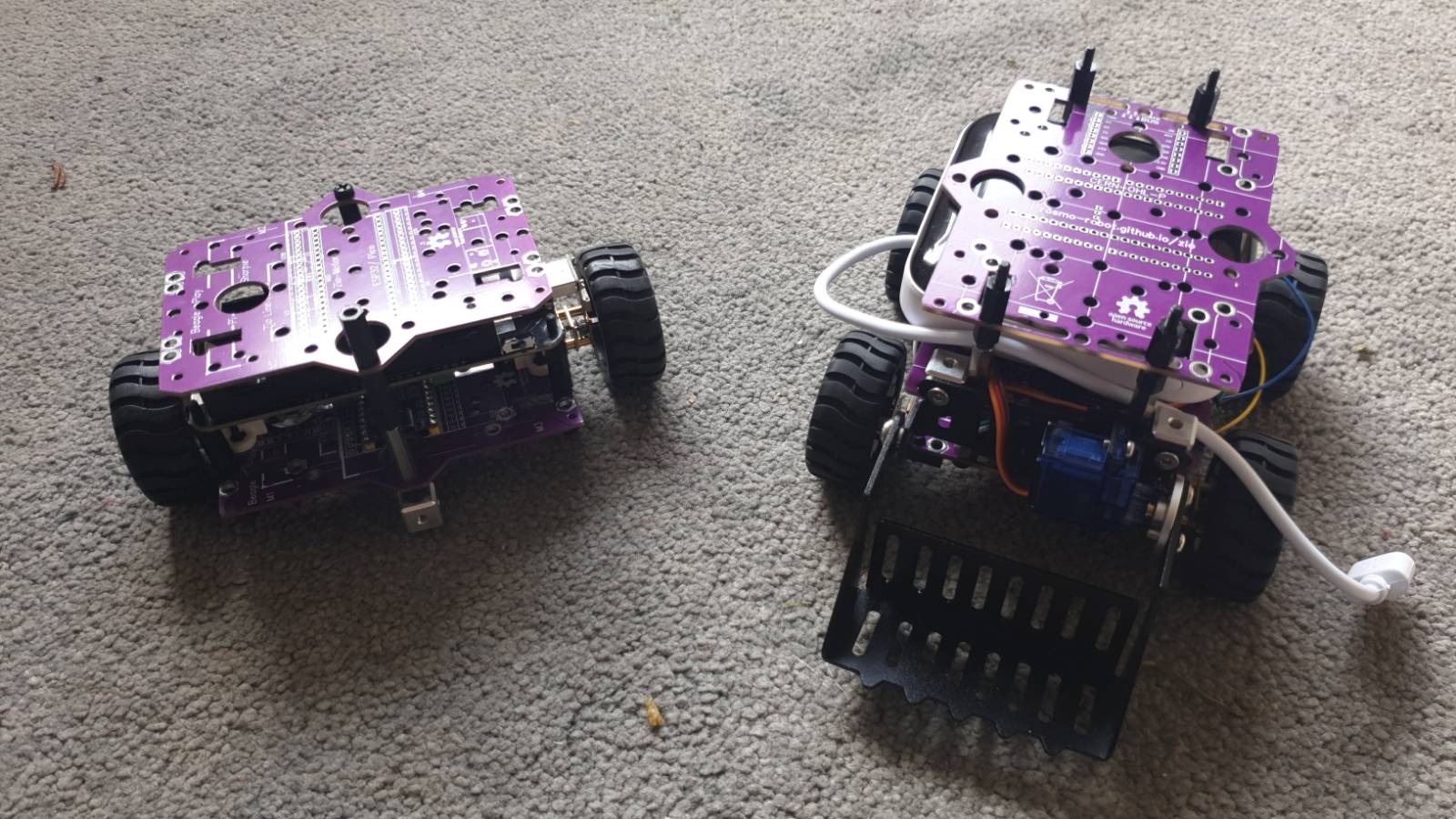
- 4WD/ Mecanum

Alternate IMU
- BMI270 6DOF Micropthon Arduino
- IMU - LSM6DSOX Micropthon Arduino
- LSM6DSV16X 6DOF no Micropthon Arduino
- ISM330DHCX 6DOF A ISM330DHCX 6DOF B Micropthon Arduino
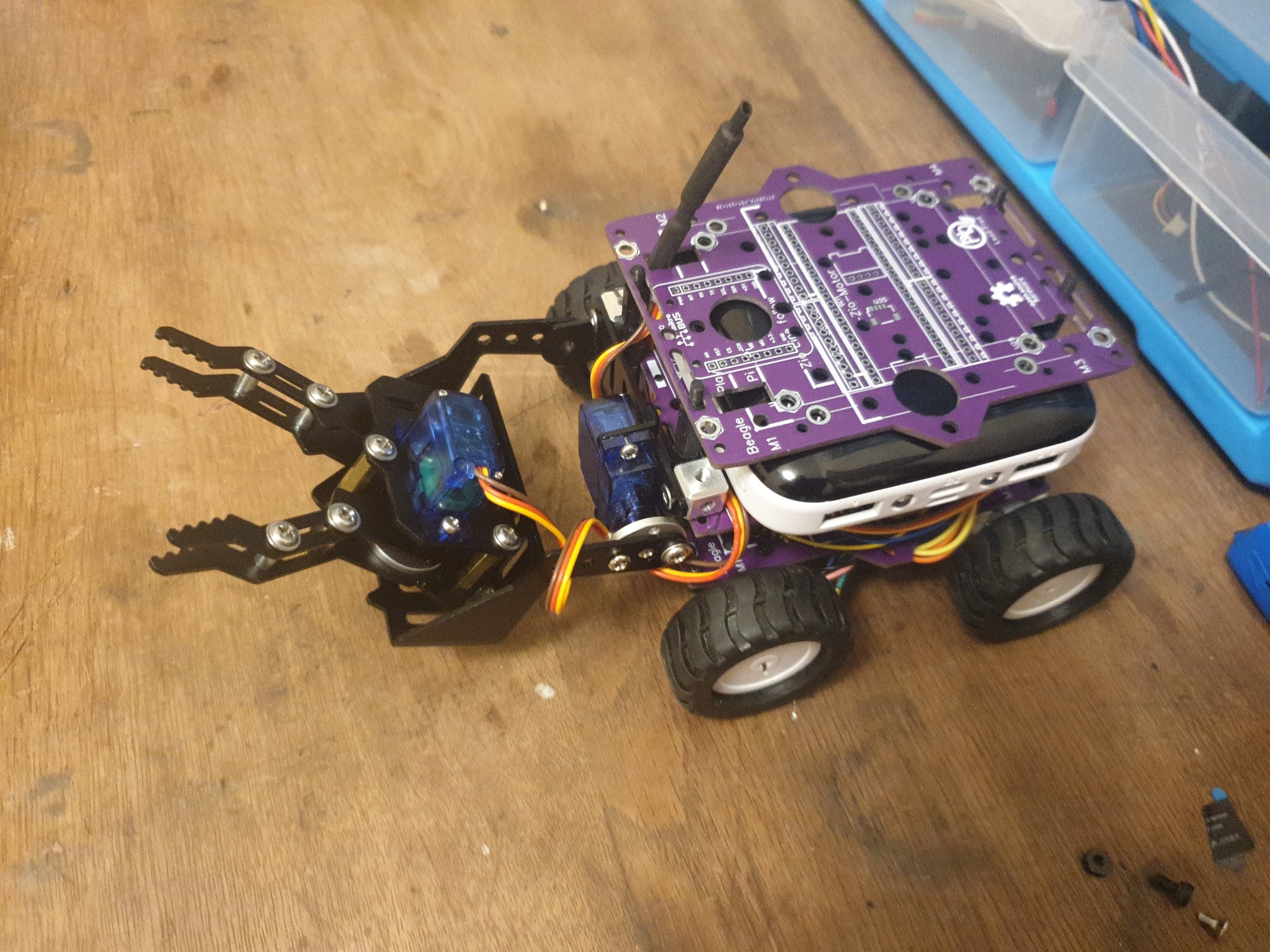
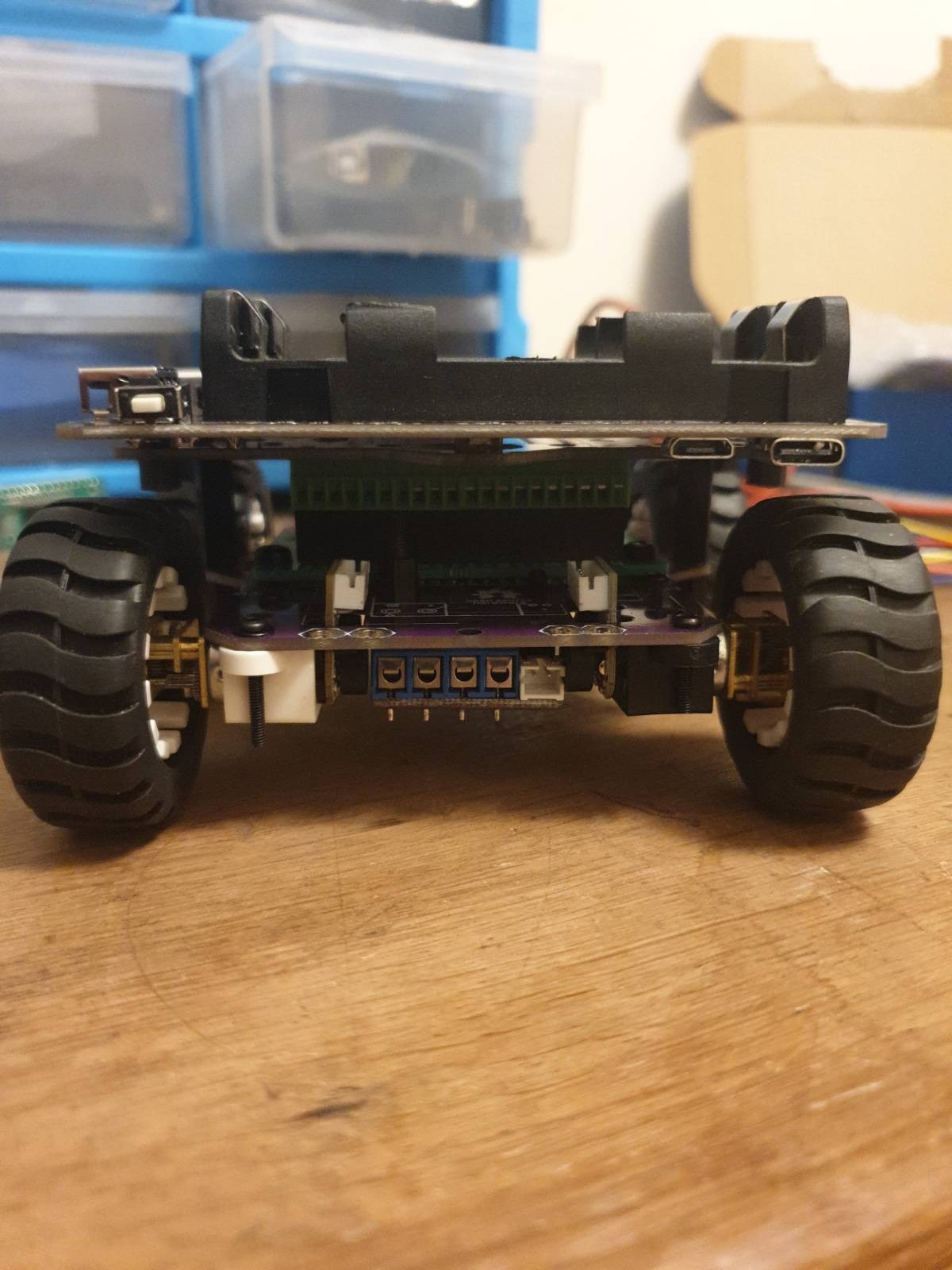
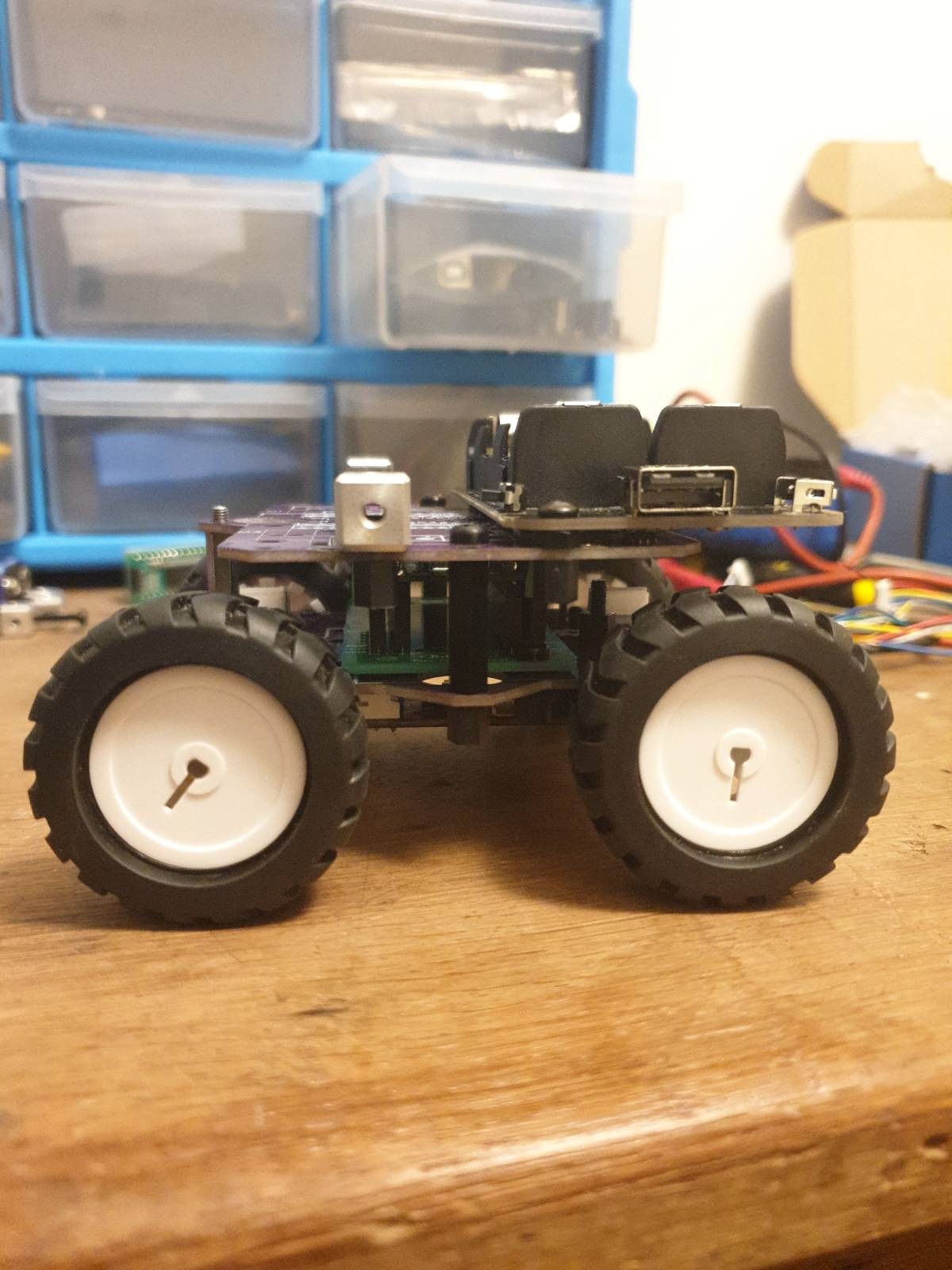
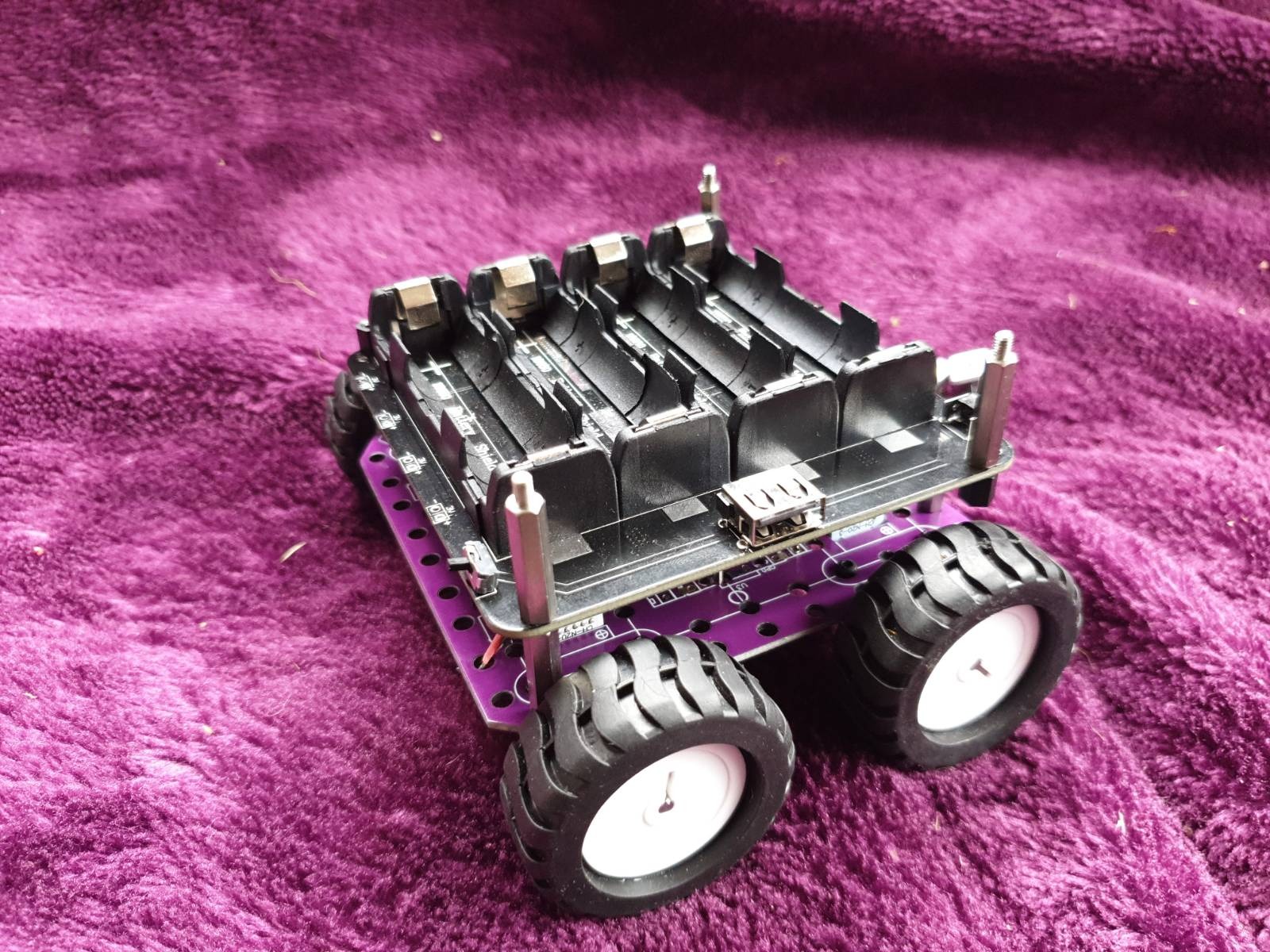 Top plate removed to expose battery layer
Top plate removed to expose battery layer
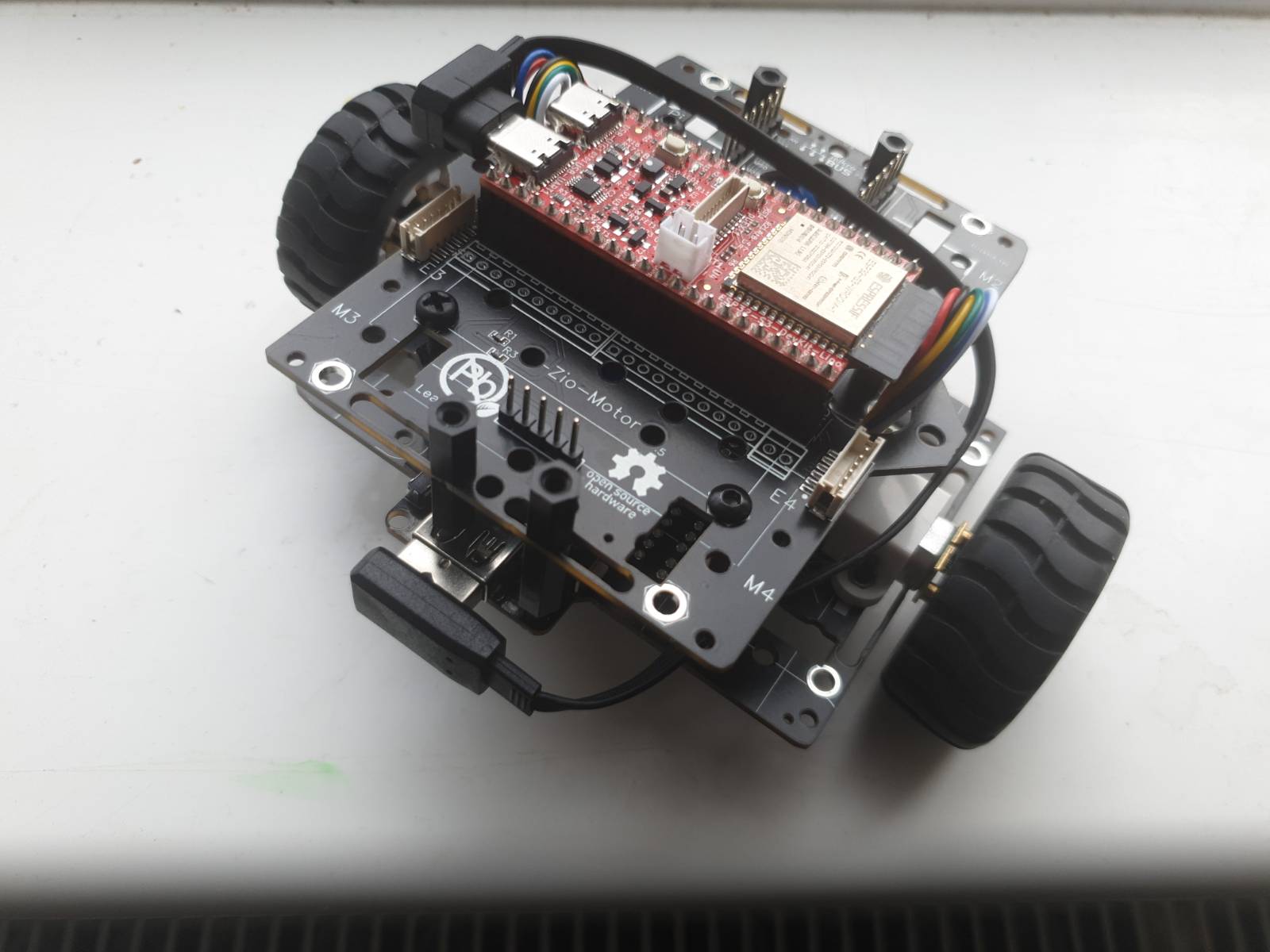
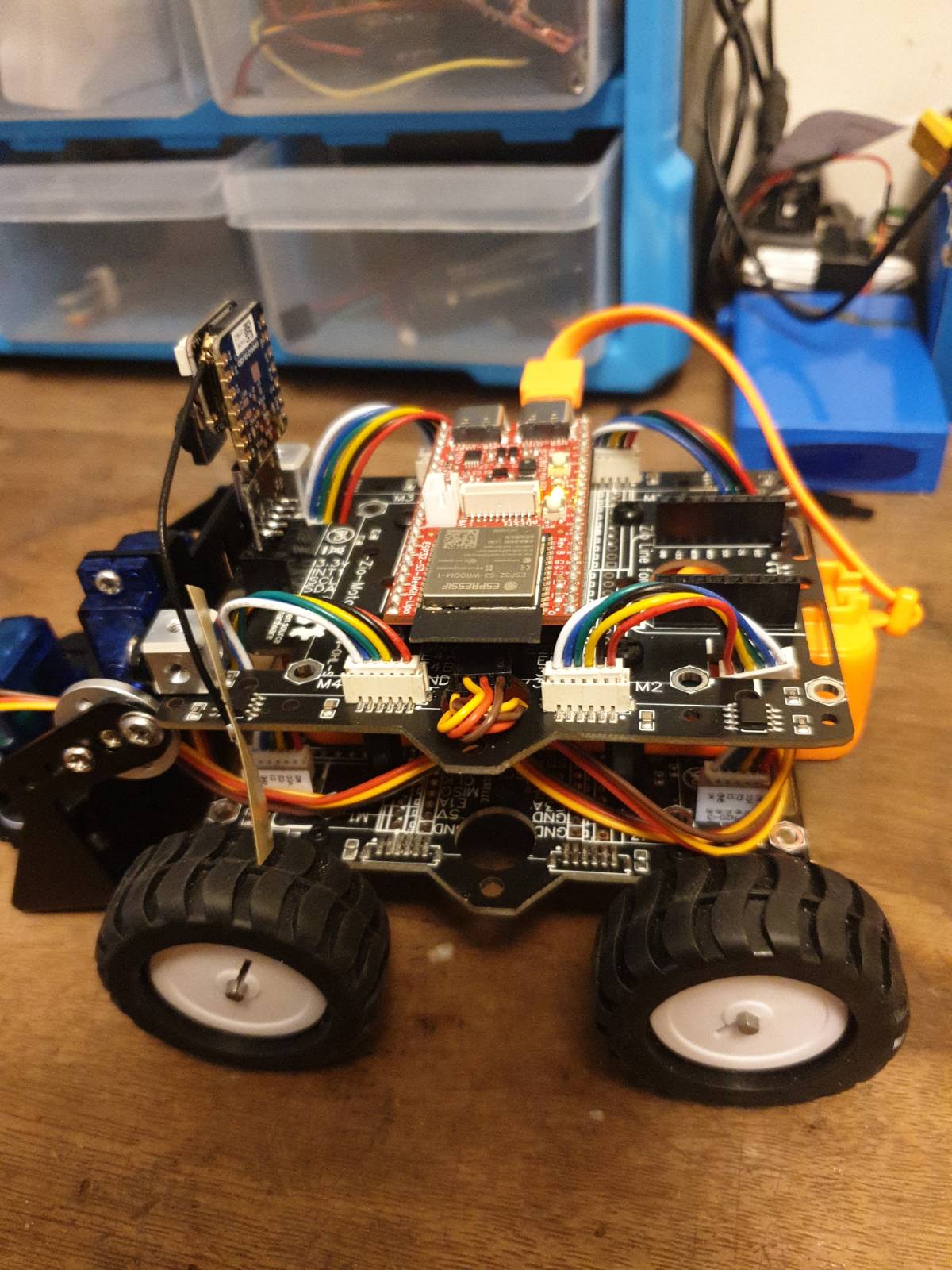
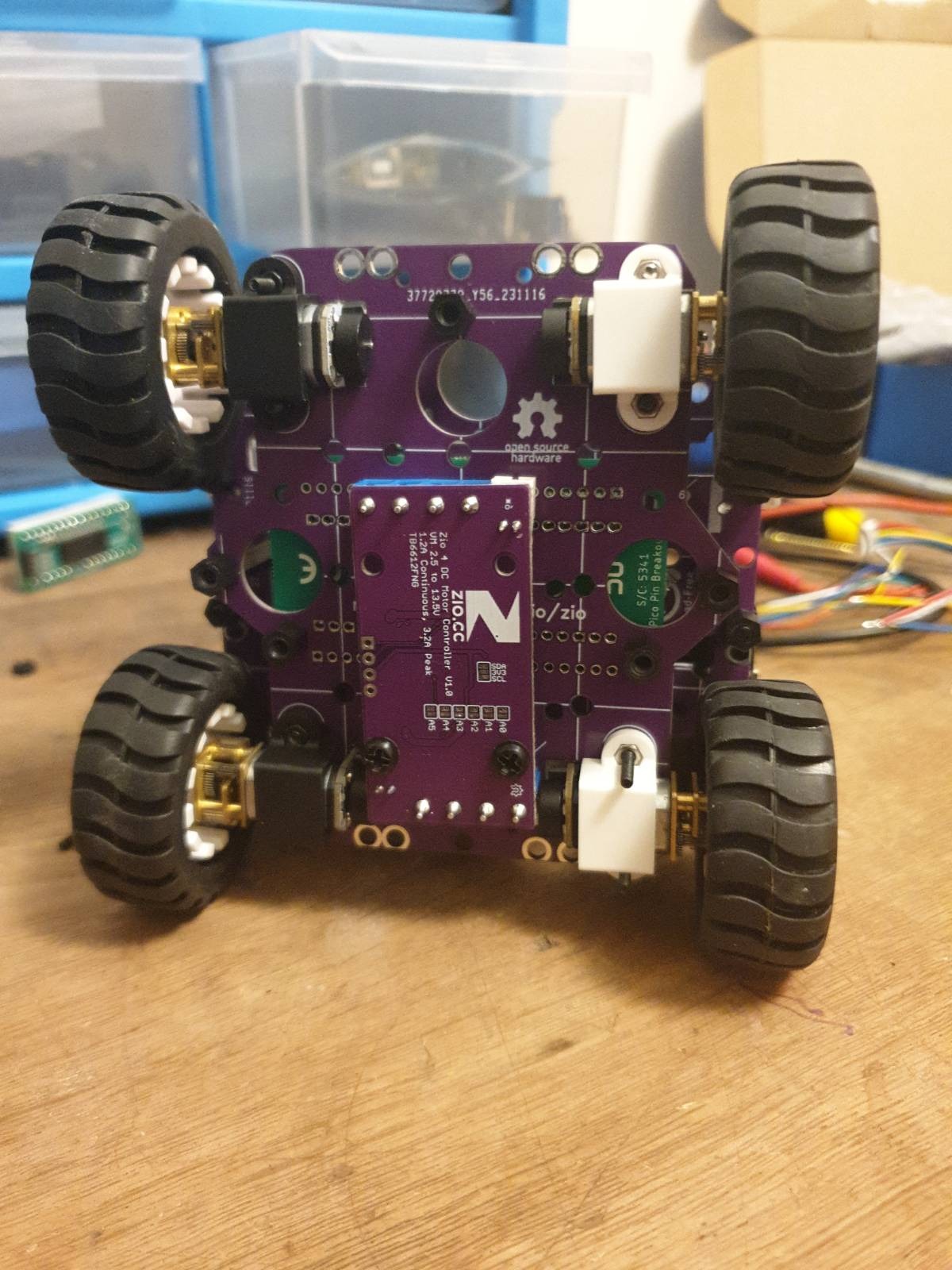
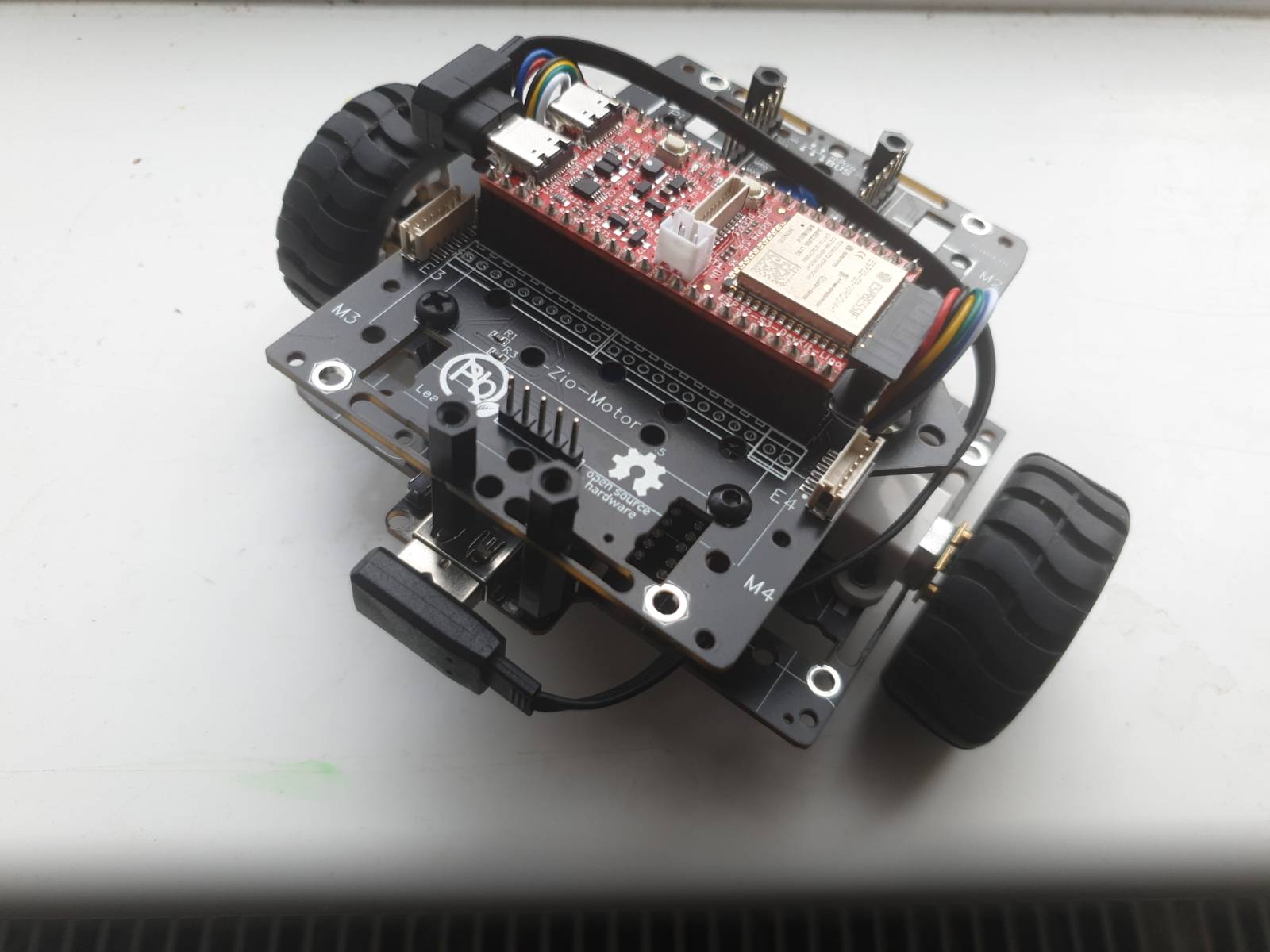
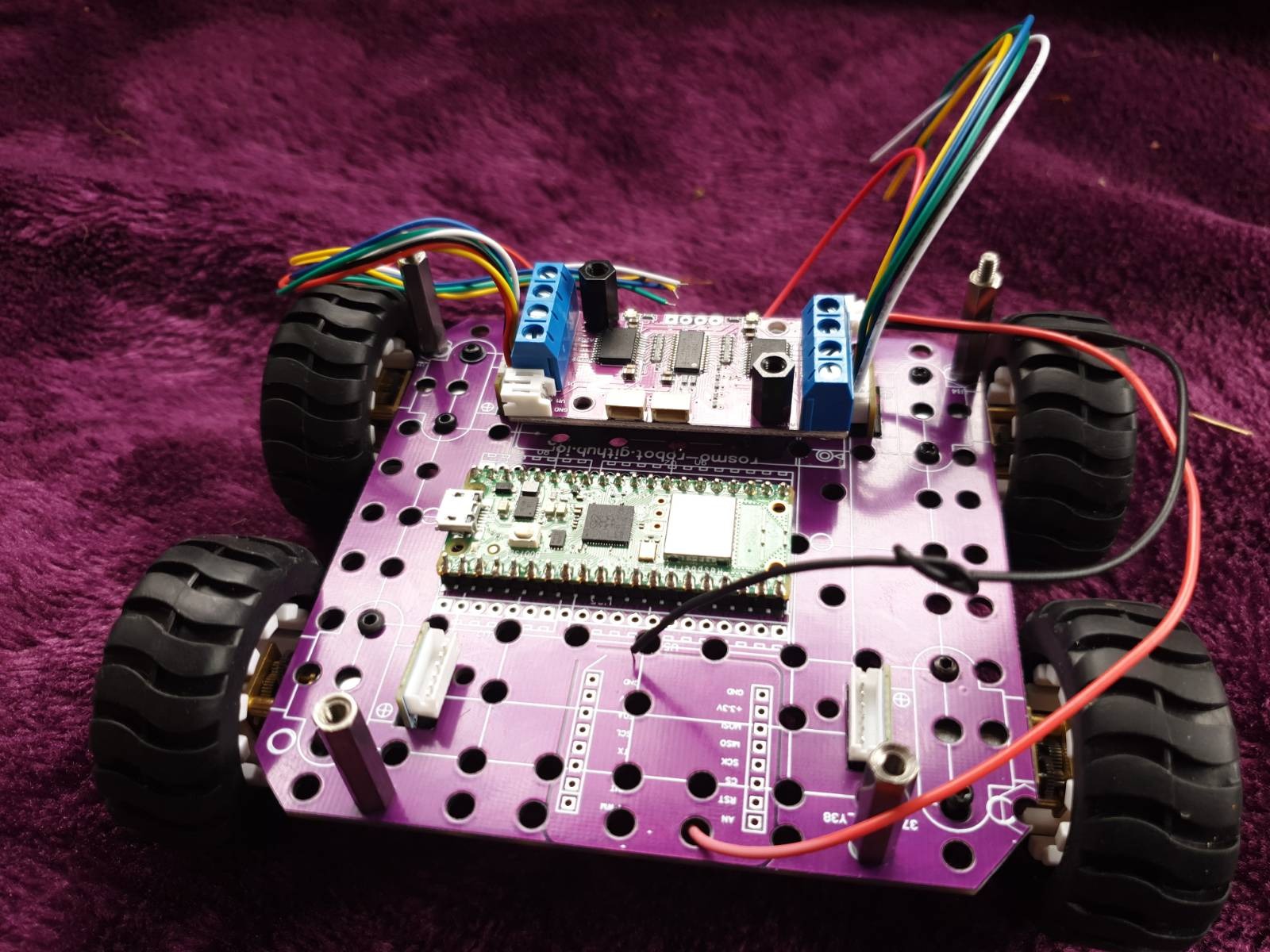 Battery layer removed to expose motor controller, microcontroller, exposed motor/encoder connections. Mikrobus click footprint Not shown are screw terminals as I haven’t soldered them yet.
Battery layer removed to expose motor controller, microcontroller, exposed motor/encoder connections. Mikrobus click footprint Not shown are screw terminals as I haven’t soldered them yet.